今回は、森のイノベーションラボFUJINOのバリアフリープロジェクトにて実施しているロボット開発レポートの第2回をお送りします。

突然の友人のお母様の死、開発がストップした「ロボくま」、そして再始動を経て、篠部君が新しく取り組み始めたのは、ハグという行為に着目してデザインを考案した「ハグボット」の制作です。ハグという行為に着目したのは、ハグは人間のコミュニケーションのなかで最も親密と言われており、安心感や親密感を得られるコミュニケーションロボットとして適したデザインであると考えたためです。
しかし、ふたたび大きな壁が立ちはだかります。当時高校2年生だった篠部君には、ロボットを開発する資金力も、技術力もありませんでした。篠部君はさまざまな人に相談を重ね、森のイノベーションラボFUJINOのコミュニティーマネージャーを務める高橋と出会います。
高橋が提案したのは、相模原市が主催するSDGs連携推進事業補助金でした。この補助金は、市内のSDGsパートナーとの連携を通じて、SDGsの達成や地域課題の解決に向けて先進的に取り組む事業に対してその費用を補助をするものです。
もとより篠部君が目指していたロボット開発を通じた「物理的バリア」の解消は、誰もが身体的制約にとらわれることのない社会を目指しており、SDGsゴールである4番「質の高い教育をみんなに」および10番「人や国の不平等をなくそう」に寄与するものです。ひいてはSDGsに通底する原則である「誰一人取り残さない」社会を目指す取り組みでもあります。

申請と審査の結果、2023年10月に補助金採択が決定し、ひとつの壁であった資金を獲得することに成功しました。また、もう一方の壁であった技術は、相模原市地域おこし協力隊員との協働により、センサー類を制御するRaspberry Piのプログラミングのアドバイスを受けることができました。
「ハグボット」制作は、「デザイン」、「3Dスキャン/3Dプリント」、「組み込みシステム開発」、「外装設計」の4ステップで進みました。
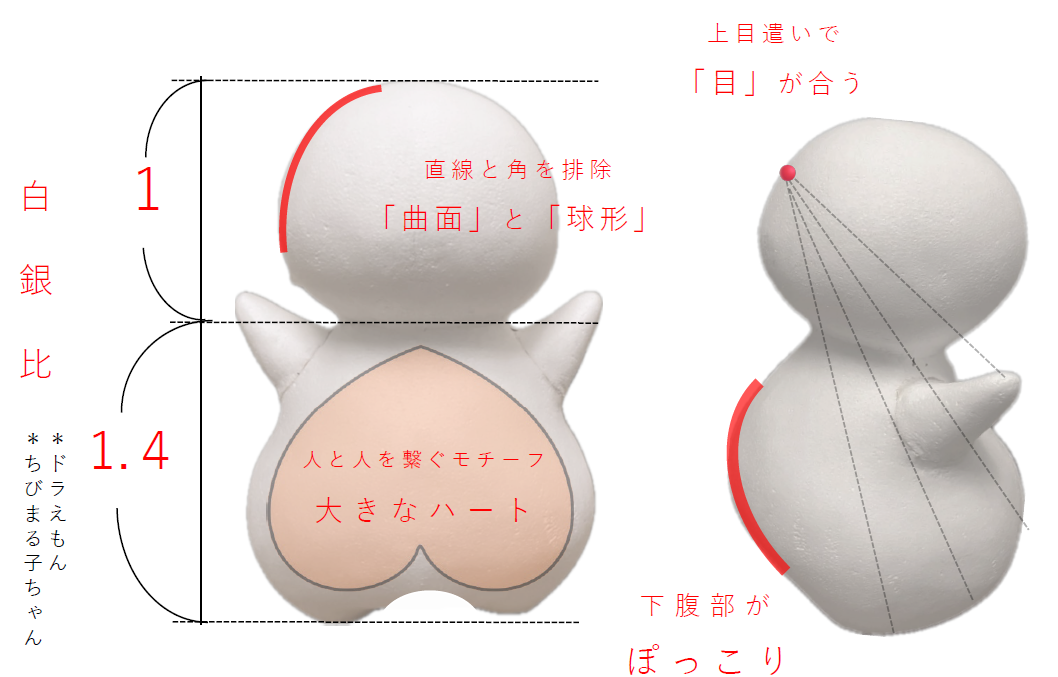
第1ステップは「デザイン」です。人がハグしたくなるデザインに関する先行研究を調査した結果、ロボットと人間の構造の相違点として、ロボットには「直線と直角」があり、人間には「曲面と球形」があることを見出し、後者に重点を置いたデザインにしました。またハグした時に、自然と上目遣いになり、お互いの目線が合うデザインとしました。
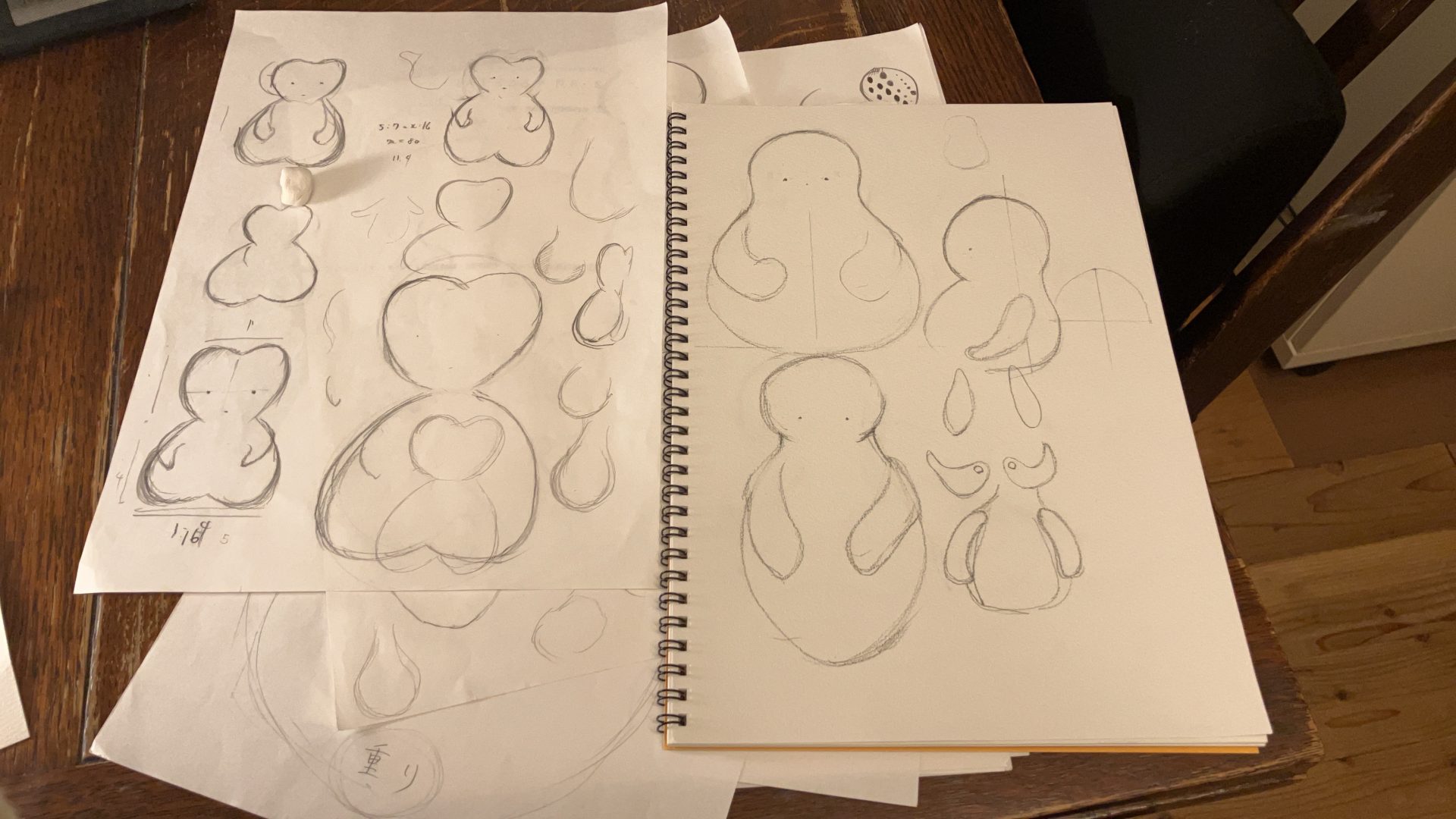
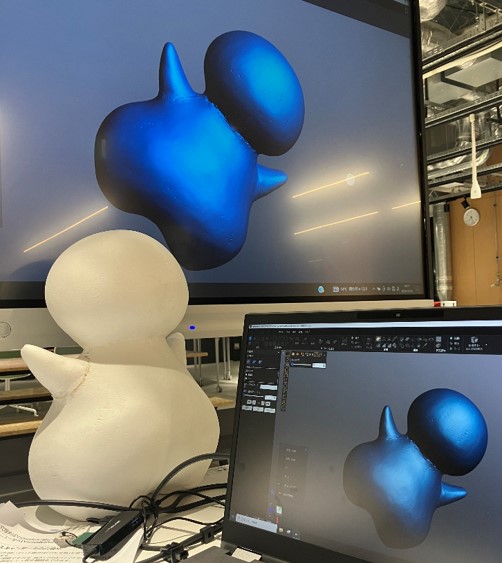
第2ステップは「3Dスキャン/3Dプリント」です。デザインの構想が固まった後には、「発泡スチロールの削り出し」、「発泡スチロールの3Dスキャン」、「3Dスキャンのデータを用いた3Dプリント」と歩みを進めます。

「発泡スチロールの3Dスキャン」は、港区立産業振興センターにある3Dスキャナーを用いて、発泡スチロールの形状を3Dデータ化しました。そして、「3Dスキャンのデータを用いた3Dプリント」は、DMM.makeに依頼し3Dプリンターで切削しました。
第3ステップは「組み込みシステム開発」です。基本的には「ハグボット」に、ビデオ通話と同様の機能を組み込み、遠隔地とのコミュニケーションを実現しました。そういった技術について詳しくない篠部君は、組み込み系システムエンジニアの経歴を持つ相模原市地域おこし協力隊の中島竜馬と協働で開発に取り組みました。まずはRaspberry Piという小型PCへ、スピーカーやカメラ、マイクなどのセンサー類を組み込みます。相手とのコミュニケーションが円滑に行われるように、通常カメラと広角カメラの2つを搭載しました。その後、ビデオ通話システムを使用してインターネットを介した遠隔地とのコミュニケーションが実現しました。また、バッテリー搭載により場所を問わずコミュニケーションを取ることができるようになりました。

第4ステップは「外装設計」です。スピーカーやカメラといったセンサー類がなるべく目立たないように、外装にあたる衣装を作り、より親近感や温かみを出す工夫をしました。全体を覆う白地の生地をベースに、交換可能なエプロン等の衣装を用意しました。

上記の4ステップを経て、晴れて「ハグボット」は完成しました。

